Minimal example: asynchronous mode#
It is time to run your first example!
Goals
Test the installation of the DQ Robotics library.
Get familiar with the class
DQ_VrepInterface().Know the method
get_object_pose().Understand the asynchronous mode (default mode).
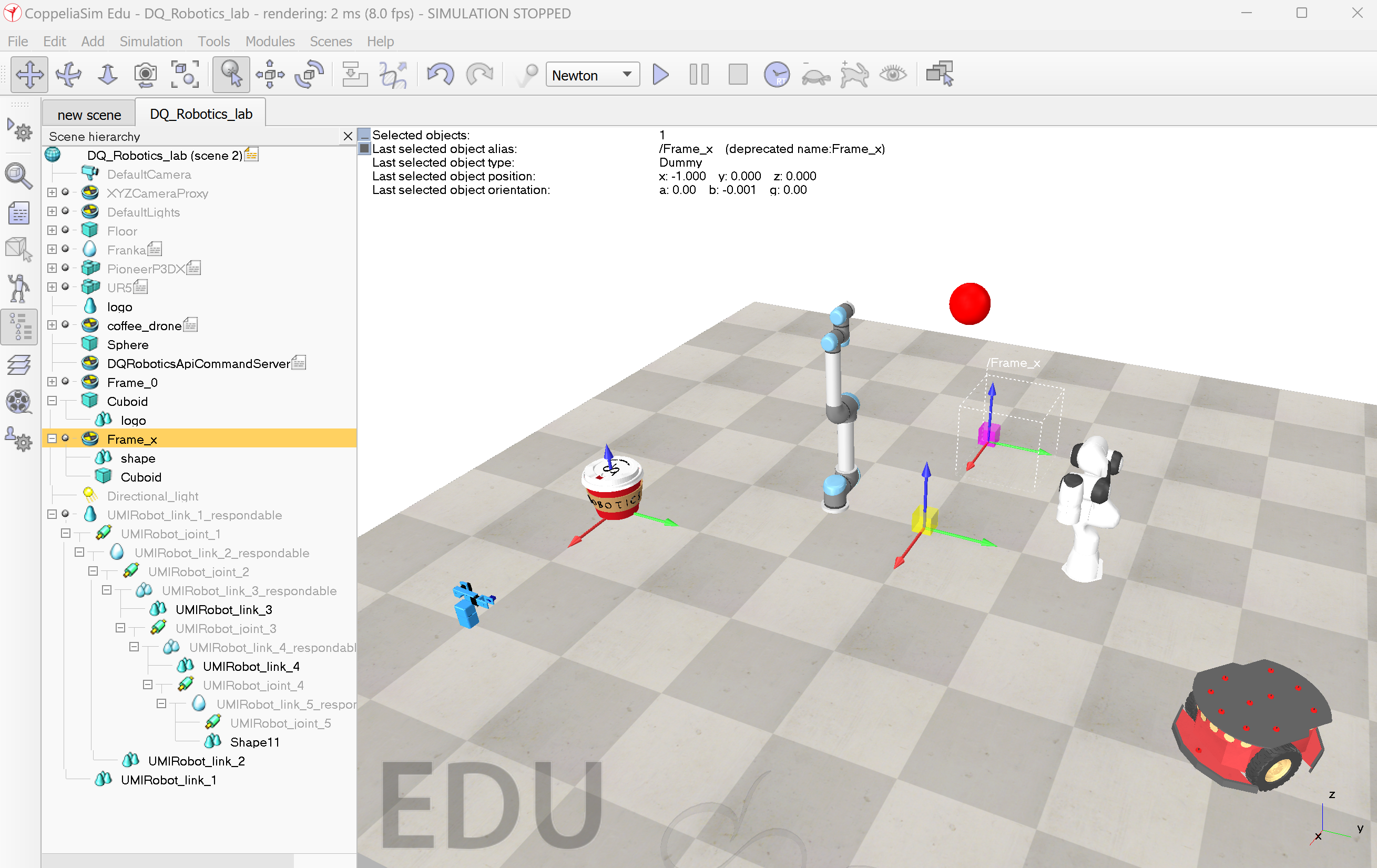
Open the DQ_Robotics_lab.ttt scene (see One scene to rule them all). Suppose we want to get the position of object Frame_x via code.
If you check the scene, you’ll notice that is located in the position [-1,0,0]. Therefore, we expect as result the
pure quaternion -i.
For this example, we are going to use the asynchronous mode. This is the default operation mode of CoppeliaSim.
This mode means that the simulation on CoppeliaSim will advance without taking into account the progress of your script.
Alternatively, CoppeliaSim supports the synchronous mode. (see Minimal example: synchronous mode).
To get the pose (position and orientation) of an object we need to use the method get_object_pose() of the class
DQ_VrepInterface().
Roughly speaking, in the default mode (asynchronous mode), you need to do the following steps:
Instantiate an object of the
DQ_VrepInterface()class.Establish the connection to an specific IP and port. If you are running both the script and the simulation in the same computer, the default IP is
127.0.0.1and the default port is19997.Start the simulation.
Do whatever you want to do. For instance, get the object pose.
Stop the simulation.
Disconnect.
Templates:#
The following templates are minimal scripts with the DQ_VrepInterface() class and contain good practices for Matlab, Python, and C++.
Those are based on hundreds of feedbacks provided by the Maintainers of the DQ Robotics.
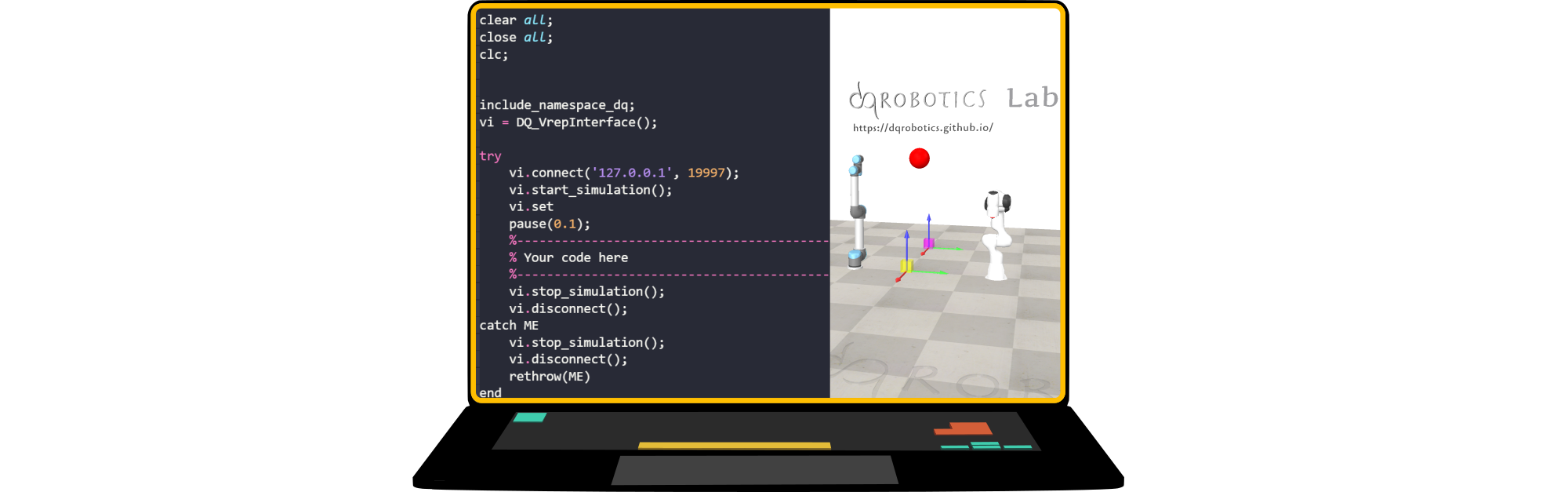
The templates show how to establish communication with a CoppeliaSim scene in asynchronous mode (default mode) using the default port. It’s assumed that both the script and
the scene are running in the same computer (default IP).
1clear all;
2close all;
3clc;
4
5
6include_namespace_dq;
7vi = DQ_VrepInterface();
8
9try
10 vi.connect('127.0.0.1', 19997);
11 vi.start_simulation();
12 pause(0.1);
13 %-----------Your code here-------------------
14
15 %----------------------------------------------
16 vi.stop_simulation();
17 vi.disconnect();
18catch ME
19 vi.stop_simulation();
20 vi.disconnect();
21 rethrow(ME)
22end
1#!/bin/python3
2from dqrobotics.interfaces.vrep import DQ_VrepInterface
3import time
4
5vi = DQ_VrepInterface()
6
7
8def main() -> None:
9 vi = DQ_VrepInterface()
10 try:
11 if not vi.connect("127.0.0.1", 19997, 100, 10):
12 raise RuntimeError("Unable to connect to CoppeliaSim.")
13
14 vi.start_simulation()
15 time.sleep(0.1)
16 # --------------Your code here----------------------------
17
18 # ---------------------------------------------------------
19
20 except (Exception, KeyboardInterrupt) as e:
21 print(e)
22 pass
23
24 finally:
25 vi.stop_simulation()
26 vi.disconnect()
27
28
29if __name__ == "__main__":
30 main()
1#include <iostream>
2#include <dqrobotics/interfaces/vrep/DQ_VrepInterface.h>
3#include <thread>
4
5int main()
6{
7 auto vi = DQ_VrepInterface();
8 try {
9 if (!vi.connect("127.0.0.1", 19997,100,10))
10 throw std::runtime_error("Unable to connect to CoppeliaSim.");
11 vi.start_simulation();
12 std::this_thread::sleep_for(std::chrono::milliseconds(100));
13 //-----------------Your code here--------------------------
14
15 //---------------------------------------------------------
16 vi.stop_simulation();
17 vi.disconnect();
18 } catch (std::exception& e) {
19 std::cout<<e.what()<<std::endl;
20 vi.stop_simulation();
21 vi.disconnect();
22 }
23 return 0;
24}
See also
CMake examples for Ubuntu, Windows and MacOS dqrobotics/cpp-examples
1# Example CMAKE project for Ubuntu
2make_minimum_required(VERSION 3.5)
3
4project(template)
5
6set(CMAKE_CXX_STANDARD 11)
7
8FIND_PACKAGE(Threads REQUIRED)
9FIND_PACKAGE(Eigen3 REQUIRED)
10INCLUDE_DIRECTORIES(${EIGEN3_INCLUDE_DIR})
11ADD_COMPILE_OPTIONS(-Werror=return-type
12 -Wall -Wextra -Wmissing-declarations
13 -Wredundant-decls -Woverloaded-virtual)
14
15add_executable(${PROJECT_NAME}
16 ${PROJECT_NAME}.cpp)
17
18target_link_libraries(${PROJECT_NAME}
19 dqrobotics
20 dqrobotics-interface-vrep
21 Threads::Threads)
Hint
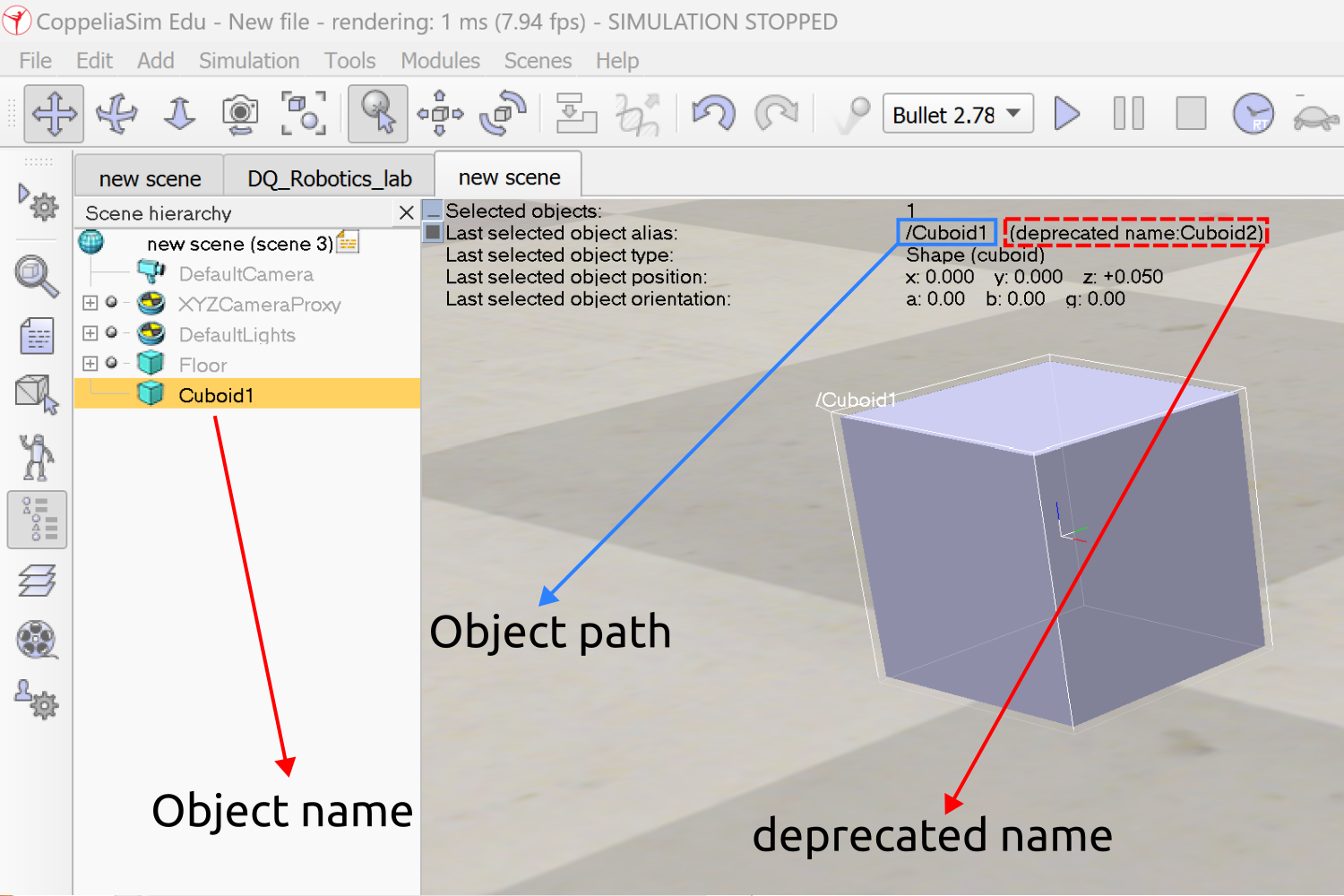
From CoppeliaSim V4.3.0 and up, objects can be accessed with object names (deprecated) and object paths (recommended). See more in Accessing scene objects programmatically.
For instance: the deprecated name of the object Frame_x
is Frame_x and its path corresponds to /Frame_x.
Warning
In case you use the object name, you are required to use the deprecated name.
The deprecated name does not always coincide with the object name displayed in the scene hierarchy.
Example#
1clear all;
2close all;
3clc;
4
5
6include_namespace_dq;
7vi = DQ_VrepInterface();
8
9try
10 vi.connect('127.0.0.1', 19997);
11 vi.start_simulation();
12 pause(0.1);
13 x = vi.get_object_pose('/Frame_x');
14 disp('Position: ')
15 translation(x)
16 disp('The test was succesful!')
17 vi.stop_simulation();
18 vi.disconnect();
19catch ME
20 vi.stop_simulation();
21 vi.disconnect();
22 rethrow(ME)
23end
1#!/bin/python3
2from dqrobotics.interfaces.vrep import DQ_VrepInterface
3import time
4
5
6
7
8def main() -> None:
9 vi = DQ_VrepInterface()
10 try:
11 if not vi.connect("127.0.0.1", 19997, 100, 10):
12 raise RuntimeError("Unable to connect to CoppeliaSim.")
13
14 vi.start_simulation()
15 time.sleep(0.1)
16 x = vi.get_object_pose("/Frame_x")
17 print("Position: ", x.translation())
18 print("The test was successful!")
19
20 except (Exception, KeyboardInterrupt) as e:
21 print(e)
22 pass
23
24 finally:
25 vi.stop_simulation()
26 vi.disconnect()
27
28
29if __name__ == "__main__":
30 main()
1#include <iostream>
2#include <dqrobotics/interfaces/vrep/DQ_VrepInterface.h>
3#include <thread>
4
5int main()
6{
7 auto vi = DQ_VrepInterface();
8 try {
9 if (!vi.connect("127.0.0.1", 19997,100,10))
10 throw std::runtime_error("Unable to connect to CoppeliaSim.");
11 vi.start_simulation();
12 std::this_thread::sleep_for(std::chrono::milliseconds(100));
13 DQ x = vi.get_object_pose("/Frame_x");
14 std::cout<<"Position: "<<x.translation()<<std::endl;
15 std::cout<<"the test was successful!"<<std::endl;
16 vi.stop_simulation();
17 vi.disconnect();
18
19 } catch (std::exception& e) {
20 std::cout<<e.what()<<std::endl;
21 vi.stop_simulation();
22 vi.disconnect();
23 }
24 return 0;
25}
You will have the following output:
See also
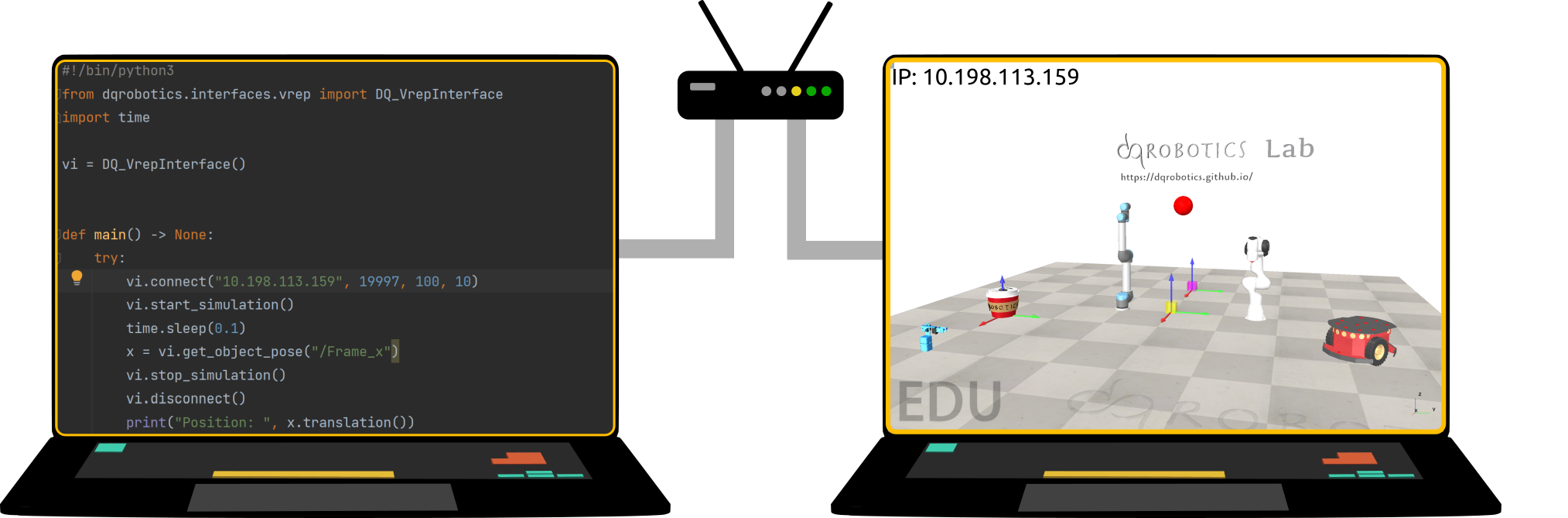
You can run the script and the simulation on different computers that are on the same local network.
To do so, in connect() use the IP of the computer that is running the simulation. For instance, lets say
that your simulation is running on a PC with the IP address 10.198.113.159. Then,
in the example, you must replace 127.0.0.1 by 10.198.113.159.
vi.connect('10.198.113.159', 19997);
vi.connect("10.198.113.159", 19997, 100, 10)
vi.connect("10.198.113.159", 19997,100,10);