One scene to rule them all#
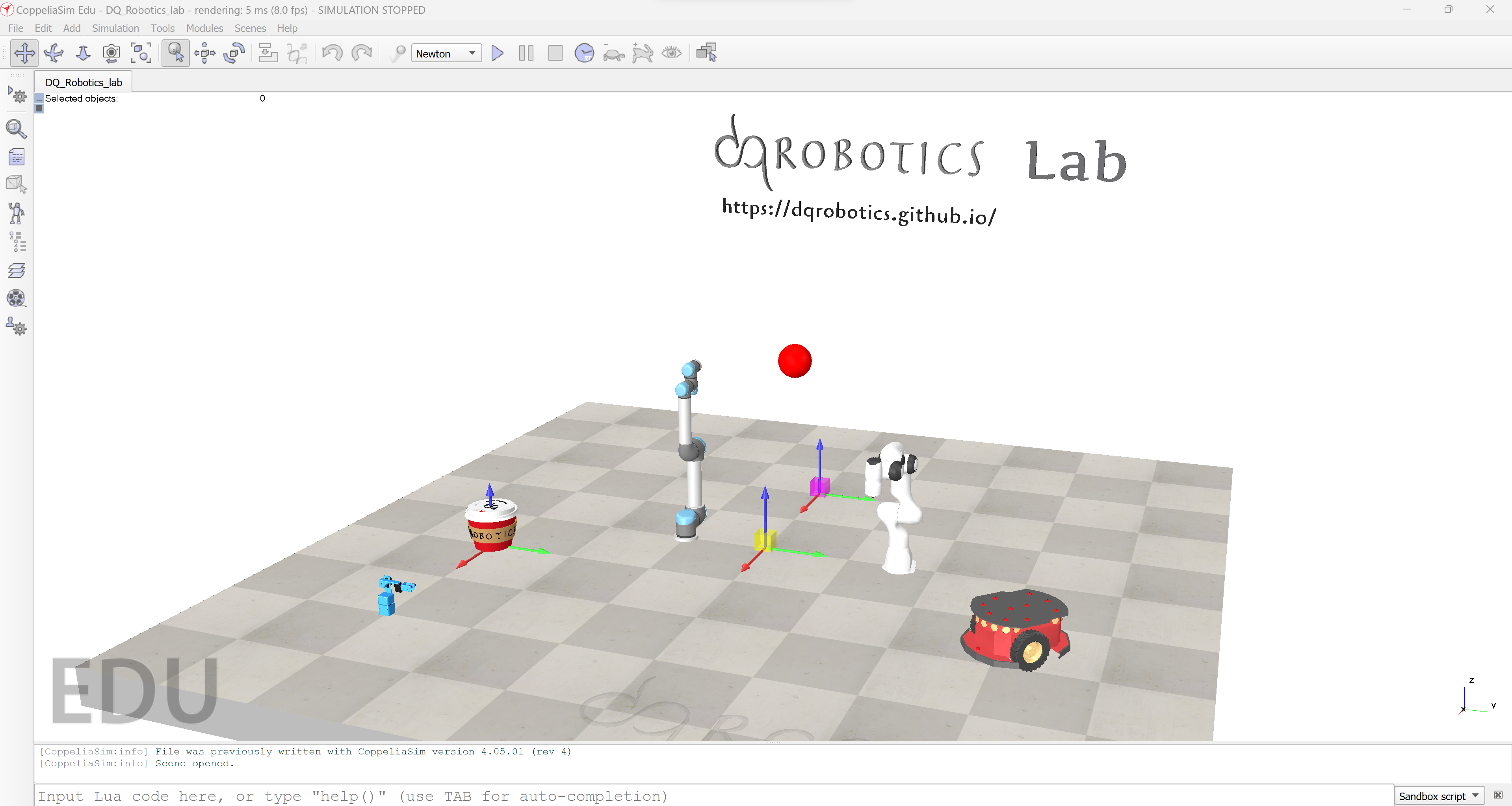
During this tutorial we will use the DQ_Robotics_lab.ttt scene, which contain a several
useful objects and robots. Most of the robots are already included in the simulator, but some of them were modified
for this tutorial.
This one scene enables examples of asynchronous and synchronous mode, kinematic and dynamic mode, and control strategies for robots commanded by joint positions, velocities, and torques. Don’t worry if you don’t know these concepts, they will be explained in this tutorial.
Download the DQ_Robotics_lab.ttt scene
Elements:#
Reference frame
Reference frame
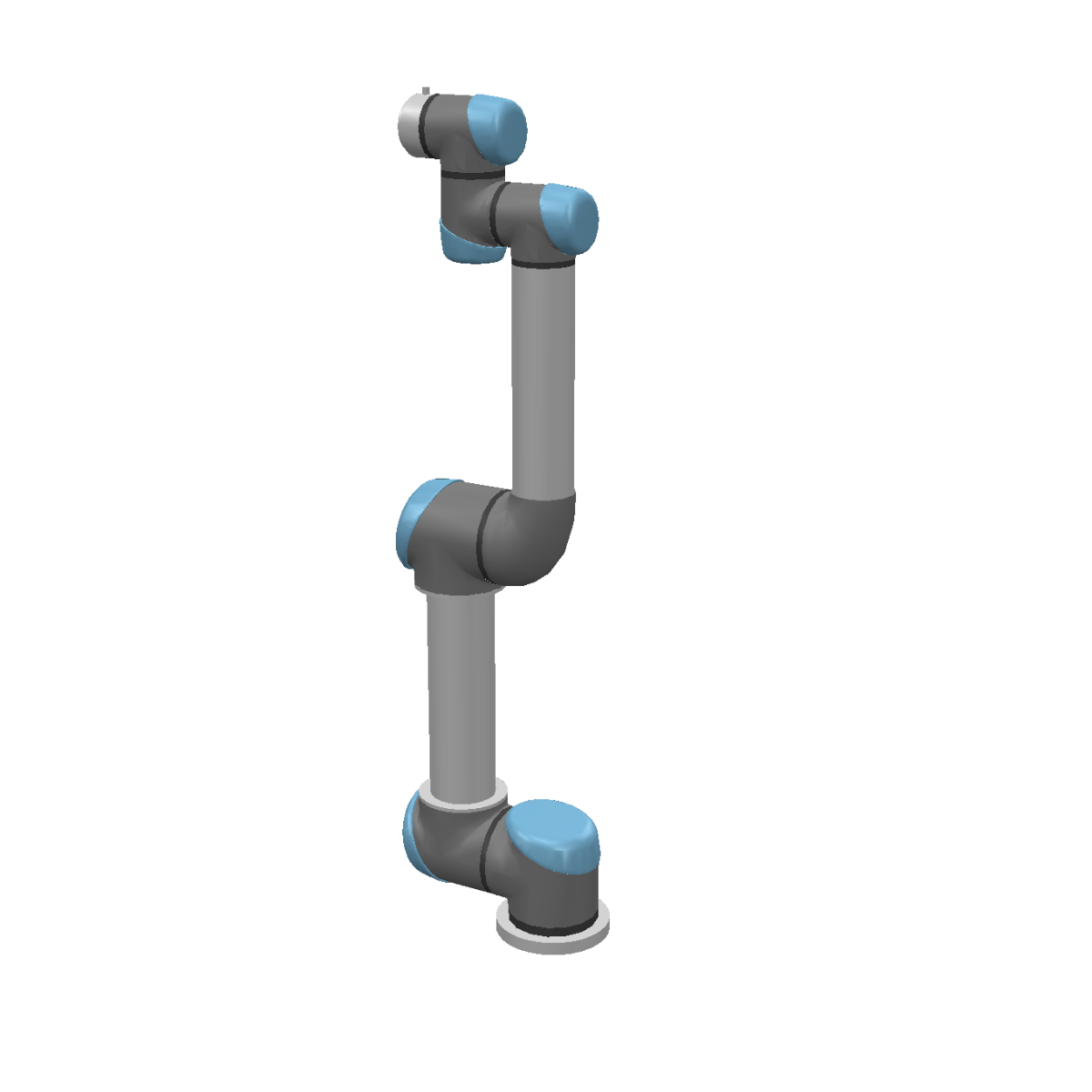
FE Panda
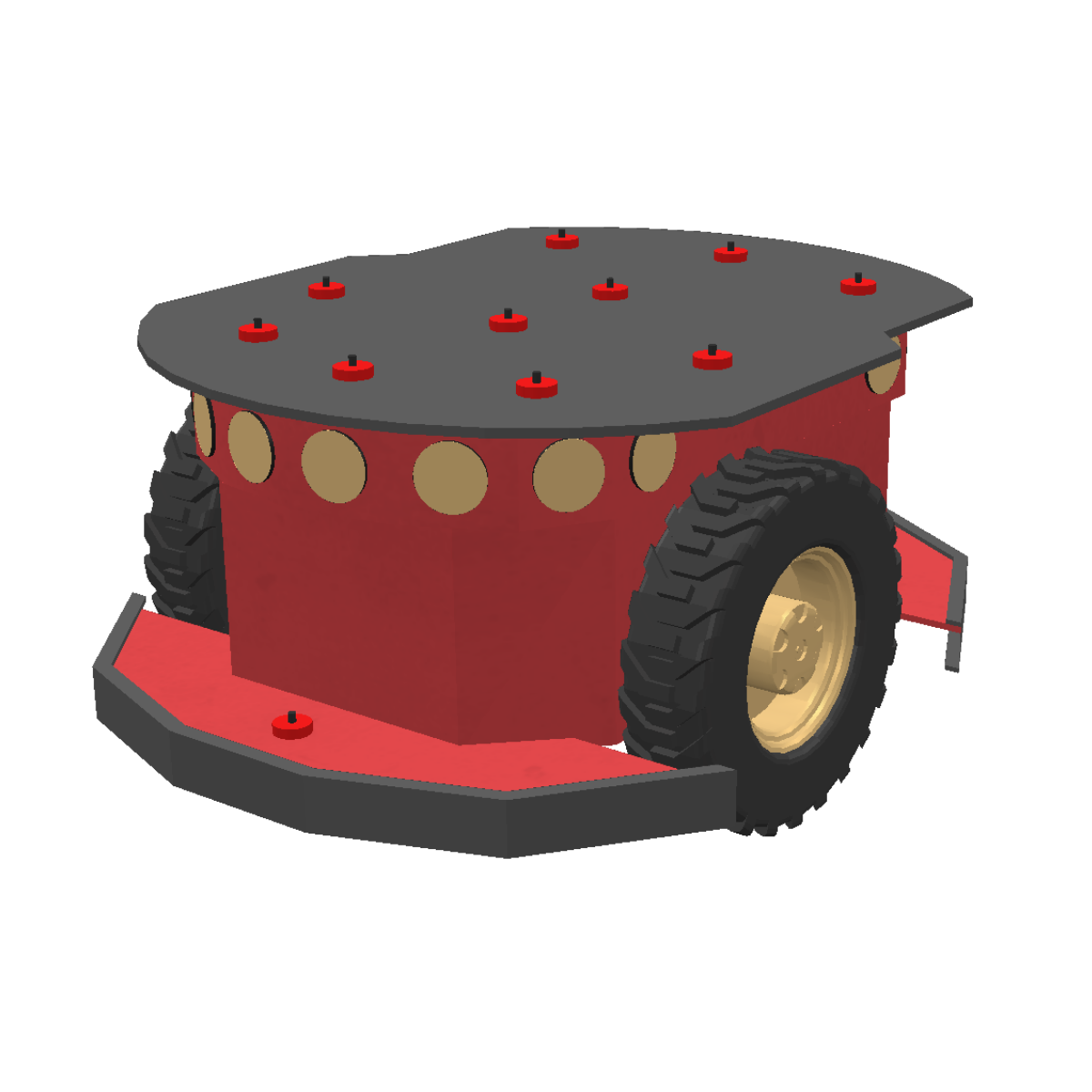
Dynamic sphere