Installation#
CoppeliaSim#
Download and install CoppeliaSim EDU from this link.
On Ubuntu, you only need to extract the downloaded file. For instance, if you use Ubuntu 22.04,
the file would seem to something like CoppeliaSim_Edu_V4_5_1_rev4_Ubuntu22_04.tar.xz. To extract it, you
can use the graphic interface or the terminal. The latter can be done as follows:
Learn more about the terminal in Ubuntu
https://ros2-tutorial.readthedocs.io/en/latest/preamble/ubuntu.html
Open a new terminal (CTRL+ALT+T) and type
cd ~/Downloads/
tar -xf CoppeliaSim_Edu_V4_5_1_rev4_Ubuntu22_04.tar.xz
You can open CoppeliaSim by typing:
~/Downloads/CoppeliaSim_Edu_V4_5_1_rev4_Ubuntu20_04/coppeliaSim.sh
Hint
You can create an alias to CoppeliaSim. For instance:
Run this (Do this only once):
echo "alias coppeliasim='~/Downloads/CoppeliaSim_Edu_V4_5_1_rev4_Ubuntu20_04/coppeliaSim.sh &'" >> ~/.bashrc
source ~/.bashrc
Now, you can type coppeliasim in your terminal to open CoppeliaSim!
Note
The DQ Robotics library uses the legacy remote API, which is available for Windows 64bits,
Ubuntu 64bits { 16.04, 18.04, 20.04, 22.04 } and MacOS 12 64bits (intel processors).
Warning
Apple Silicon macs have the option to download CoppeliaSim x86_64 and arm64.
However, the latter does not work with the legacy remote API.
Warning
MacOS users could require additional steps to run a simulation.
Add
simRemoteApi.start(19997)to the main script of the scene.Start the simulation.
Run your script.
Check the DQ Robotics documentation for more details.
DQ Robotics#
Warning
DQ Robotics for Matlab is distributed as a LGPLV3 licensed package. Matlab, however, is not free software and other third-party toolboxes may also not be free.
Note
- The installation for Matlab has four steps:
Download the DQ Robotics.
Add the DQ Robotics to the path in Matlab.
Add the
matlab folderlocated in your CoppeliaSim to the path in Matlab.Add the
remoteApilocated in CoppeliaSim to the path in Matlab. TheremoteApi
Clone the repository (you can use Github Desktop or git commands ). Alternatively, you can download the zip file.
cd ~
git clone https://github.com/dqrobotics/matlab.git
Set the path in Matlab. Example:
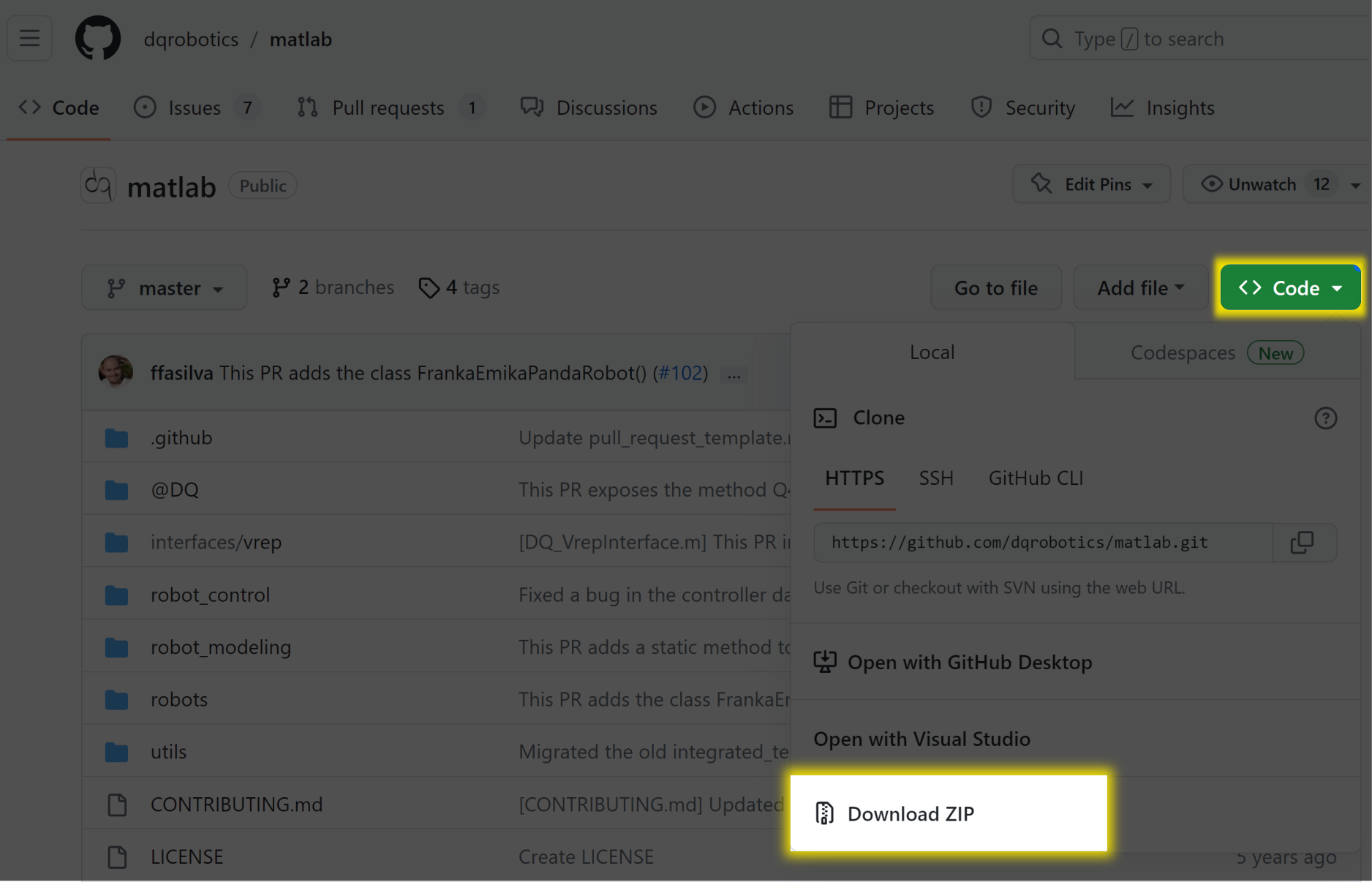
Download the zip file (Only if you did not clone the repository)
Go to the repository clik on <> Code, and clik on Download ZIP.
Unzip the matlab-master.zip file and add it to the Path in Matlab.
Add to the path both the matlab folder and the remoteApi. Usually, they are located in
YOUR_COPPELIASIM_PATH/programming/legacyRemoteApi/remoteApiBindings/lib/lib/YOUR_UBUNTU_VERSION
YOUR_COPPELIASIM_PATH/programming/legacyRemoteApi/remoteApiBindings/matlab/matlab
C:/Program Files/CoppeliaRobotics/CoppeliaSimEdu/programming/legacyRemoteApi/remoteApiBindings/lib/lib/Windows
C:/Program Files/CoppeliaRobotics/CoppeliaSimEdu/programming/legacyRemoteApi/remoteApiBindings/matlab/matlab

Tip
If you are unfamiliar with Python, check this tutorial before installing the library.
Danger
You could break your system or create annoying conflicts by using sudo to install Python packages.
Check Ubuntu Terminal Basics to learn more.
Tip
It is a good practice to isolate your Python environment (i.e., using venv to create virtual environments).
Open a terminal and run (using a virtual environment hopefully):
python3 -m pip install --user --pre dqrobotics
Hint
PyCharm is an excellent multiplatform software to manage your Python scripts and your Python environment. The Community Edition is free and open source.
Check this video using Pycharm to install DQ Robotics in a virtual environment:
Warning
The C++ version is recommended only for experienced users.
Open a terminal and run:
sudo add-apt-repository ppa:dqrobotics-dev/development
sudo apt-get update
sudo apt-get install libdqrobotics libdqrobotics-interface-vrep